Vueron Copilot™
Autonomous driving solution (ADAS)
Vueron delivers sensor-agnostic LiDAR perception software for autonomous vehicles.
Works with any LiDAR hardware. SDK-ready, production-grade.


Copilot™ Overview
Production-Ready LiDAR Perception for ADAS & Autonomous Driving
Runs in real time on automotive-grade processors and delivers accurate object and road understanding—proven on real roads with a LiDAR-only driving stack.
Copilot™ is the world’s first solution to enable autonomous driving with just a single LiDAR sensor. Using Copilot™, Vueron successfully obtained a LiDAR-only autonomous driving permit and is actively testing the technology on public roads in Korea and the United States across a wide range of real-world scenarios.
Copilot™ Functions
Production-Ready Perception for ADAS & Series-Production Vehicles
Why Copilot™
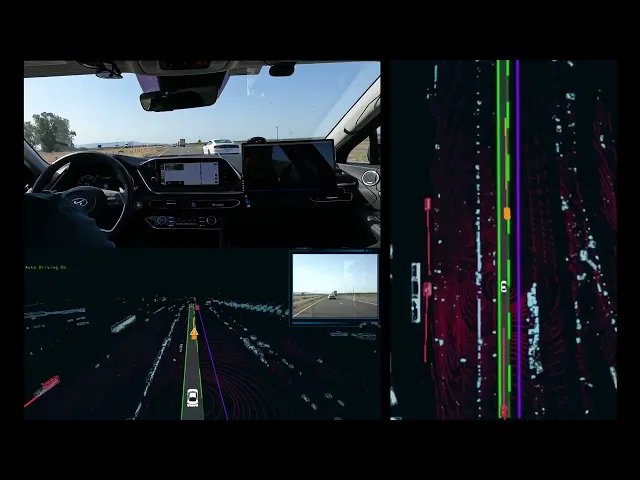
LiDAR-Only Autonomous Driving
Vueron succeeded in driving 383 miles from Los Angeles to San Francisco via Interstate 5 and Interstate 580, for 6 hours at a maximum speed of 70mph. The safety driver who rode in the vehicle never engaged.