Vueron Copilot™
ADAS(첨단 운전자 보조 시스템) 및 자율주행을 위한 LiDAR 인지 솔루션
뷰런은 자율주행을 위한 센서 독립적 LiDAR 인지 소프트웨어를 제공합니다.
어떤 LiDAR 센서와도 호환. SDK 제공, 실환경 검증 완료.


Copilot™ Overview
ADAS 및 자율주행을 위한 양산 수준의 LiDAR 인지 기술
Copilot™은 뷰런의 대표 제품으로 차량용 라이다 인지 솔루션입니다.
Copilot™은 차량용 칩에서 동작 가능하여 양산에 최적화되어 있으며, 주변 차량 및 도로 정보와 같은 필수적인 정보를 정확하게 감지하여 고객에게 제공합니다.
Copilot™은 ADAS(첨단 운전자 지원 시스템) 및 자율주행에 최적화되어 있습니다.
Copilot™은 세계 최초로 하나의 라이다 센서만으로 자율주행을 실현 가능하게 한 솔루션으로, 뷰런은 Copilot™을 사용하여 라이다 Only 자율주행 면허를 성공적으로 취득하였으며, 한국과 미국의 실제 도로에서 다양한 상황을 마주하며 테스트를 진행하고 있습니다.
Copilot™ Functions
ADAS 및 양산 차량에 최적화된 인지 솔루션입니다.
Why Copilot™
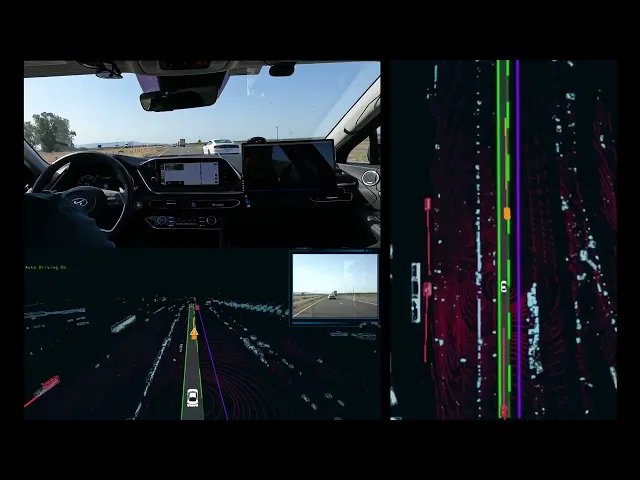
라이다 센서만으로 실현되는 자율주행
뷰런은 로스앤젤레스에서 샌프란시스코까지 5번과 580번 고속도로를 통해 6시간 동안 616km를 자율주행하는 데 성공하였습니다. 이 주행 동안 탑승하고 있던 차량의 운전자는 전혀 개입하지 않았으며, 최고 속도 113km/h로 주행이 이루어졌습니다.