뷰런테크놀로지가 트럭 플래투닝을 위한 센서 융합 인식 기술을 공개합니다.
안전한 운전을 지원하기 위한 선도 차량의 위치 및 속도 감지
스타트업 뷰런테크놀로지는 27일 Ministry of Land, Infrastructure, and Transport가 주도하는 협력 자율주행 프로젝트의 일환으로 트럭 플래투닝 기술을 성공적으로 시연했다고 발표했습니다.
이전에 뷰런은 트럭에 설치된 카메라와 레이더 시스템의 데이터를 통합하는 센서 융합 기술을 개발했습니다. 시연 중에 회사는 선도 차량의 위치와 속도를 감지하고 행렬에 끼어들려는 차량을 식별하는 인식 기술을 선보였습니다.
트럭 플래투닝은 협력 자율주행 기술을 사용하여 큰 트럭들이 함께 행렬을 이루어 이동하는 것을 의미합니다. 선도 차량이 운전을 제어하고, 후속 트럭들은 플랫폼을 통해 서로 통신하여 자율적으로 운영할 수 있습니다.
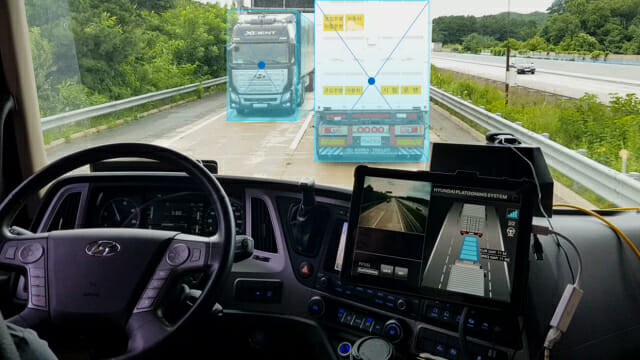
(사진: 뷰런테크놀로지)
회사는 플래투닝이 공기 저항을 줄여 연료 효율성을 개선하고 운전자의 피로를 감소시켜 궁극적으로 사고 위험을 낮춘다고 설명했습니다.
플래투닝에 있는 후속 트럭은 Level 3 자율주행으로 작동합니다. 자율주행 시스템은 운전자의 개입 수준에 따라 Level 0에서 Level 5로 분류됩니다. Level 3은 특정 조건에서 운전자가 자율주행 시스템(ADS)과 운전을 교대로 수행하는 조건부 자동화를 나타냅니다.
뷰런테크놀로지는 자율주행을 위한 LiDAR 인식 및 센서 융합 기술 전문 기업입니다. 회사는 한국 도로공사의 주도 하에 현대자동차, 카카오모빌리티 및 국민대학교를 포함한 여러 조직과 협력하여 자율주행 기술의 상용화를 추진하고 있습니다.

뷰론 테크놀로지의 CEO 김재광은 “주변 환경을 정확하게 인식하는 것이 안전한 운전에 매우 중요합니다. 우리의 플래투닝 기술을 성공적으로 시연하게 되어 기쁘며, 앞으로도 기술 개발에 집중할 것입니다.”라고 말했습니다.
출처: ZDNET Korea (https://zdnet.co.kr/view/?no=20201127173445)

